Plan B
- siebedeetens
- Dec 6, 2020
- 1 min read
Updated: Dec 13, 2020
Na verschillende testen en het stoten op verschillende problemen, is het uiteindelijk gelukt om een werkend plan B te maken. In de eerste fase is er enkel gebruik gemaakt van een P regelaar. In een andere blog post wordt er hier nog verder op ingegeaan, u kan dan zien hoe het programma opgebouwd is.
Het plan B bestaat uit verschillende break out boards, een QRT 8A sensor van Polulu, een DRV8833 van Adafruit, een HC05 module. Er zijn natuurlijk ook 2 wielen aanwezig met de ratio 30:1. Het geheel wordt zoals al eerder vertelt geprogrammeerd aan de hand van een Arduino Leonardo. Hieronder ziet u een foto van hoe plan B er uiteindelijk uit ziet.





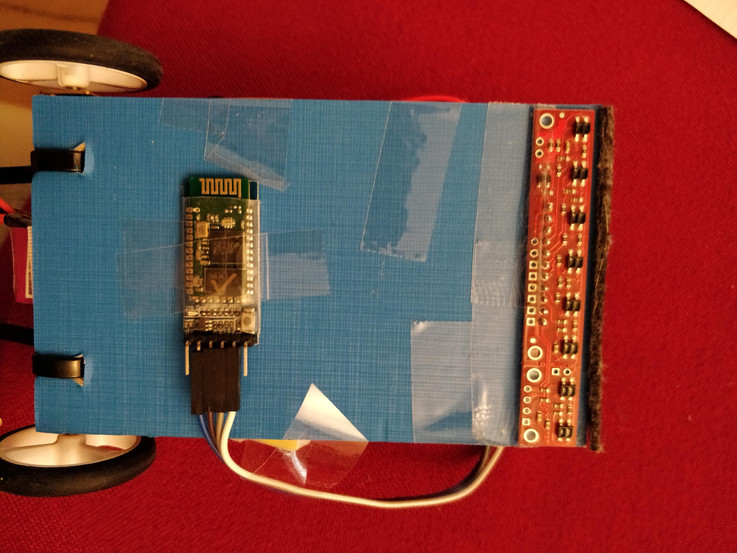
Zoals u kan zien is er nog een deel gebruikt van een breadbord. Dit is om de h-brug goed te kunnen bevestigen, zonder dat deze heen en weer zou kunnen slingeren. De HC-05 modelule is bevestigd aan de onderkant van de auto. Deze kan je zo beter wegsteken waardoor je een overzichtelijker eindresultaat verkrijgt.
In de video kan u zien dat de robot nog niet super vlot rijdt. Dit kan liggen aan het feit dat er enkel gebruik wordt gemaakt van een P-regelaar. Het kan ook eventueel liggen aan feit dat er wordt gewerkt met wielen die een ratio 30:1 hebben. Hierdoor hebben de wielen een kleiner koppel bij een lage snelheid.
Na het bekijken van de code kon er besloten worden dan er een fout was. Hier wordt de code in detail uitegelegd. Ook zal de gemaakte fout hier aan bod komen zodat u niet dezelfde fout maakt bij het maken van dit project.


Comments